1. 로봇의 기원
로봇은 1920년 체코의 작가 차페크(Capek)의 희곡 “Rossum’s universal Robots(R.U.R)”에서 처음 만들어 졌다. 로봇의 용어는 현재까지 눈부신 발전을 거듭해 왔다. 차페크의 작품은 기계 문명이나 세속적 행복에 대한 통렬한 풍자와 인간 본질에 대한 통찰로 일관되어 왔으며, “강제적인, 의무적인 노동”이라는 의미를 가진다.
차페크 이후 아이작 아시모프(Asimov)는 로봇에 관한 “I, Robot”이라는 책에서 로봇이란 단어를 사용하였다. 이 책에서 아시모프는 로봇 행동의 안전한 통합이 사회에 승인을 받을 수 있는 세 가지 방법을 제안하였다.
첫째. 로봇은 인간을 다치거나 위험에 빠지도록 해서는 안된다.
둘째. 로봇은 규범에 저촉되지 않는 한 인간의 명령에 복종하여야 한다.
셋째. 로봇은 위 두 규범이 저촉되지 않는 한 자신을 보호할 줄 알아야 한다.
아시모프는 이후 로봇공학(Robot Technology)을 발전시키는 많은 일들을 하였다.1)
아시모프는 1985년 세가지 법칙에 우선하는 0법칙을 추가하였다.
“로봇은 인류에게 해를 가하거나, 해를 끼치는 행동을 하지 않음으로써 인류에게 해를 끼치지 않는다.”
1.2 로봇의 분야
현재 로봇 산업은 크게 가정용, 의료용, 산업용, 국방용 로봇등 다양한 방면에서 무궁무진한 개발가능성을 유지하며 개발되고 있다. 각각의 분야는 매년 그 규모가 10%이상 고도성장을 유지하고 있다. 즉, 로봇 산업은 차세대 먹거리로 고부가 가치 산업으로 급부상하고 있는 분야이다.
특히, 2016년 구글의 알파고(AlphaGo)와 이세돌의 바둑경기가 전 세계에 송출되며 인공지능 분야 또한 로봇공학 분야의 한 분야로 급격한 발전을 거듭하고 있다. 이런 로봇 산업은 일반 개개인에게도 서비스를 제공하는 애플, 구글, 삼성, 아마존 등의 기업에서도 활발히 개발되며 우리 가까이로 빠른 속도로 다가오고 있다.
산업용 로봇은 자동 제어에 의한 매니퓰러이터의 조작 기능을 가지고, 각종 작업을 프로그램에 의하여 실행할 수 있으며, 산업에 사용되는 기계를 의미한다. 산업에서는 산업용 로봇을 도입함으로 경제적, 사회적, 및 기술적 효과를 얻을 수 있다. 이는 산업용 로봇이 기존에 자동화가 곤란한 다품종 소량 생산의 자동화를 가능하게 하였고, 최저 임금의 상승 및 기술 노동력 부족에 대처함으로서 생산성 향상에 큰 기여를 하고 있다.
1.3 산업용 로봇의 역사
로봇이라는 용어가 생기기 이전 기원전 1세기경 고대에 알렉산드리아의 기계학자 헤론이 증기, 동물 또는 사람의 힘을 이용해 문을 열거나 파이프 오르간을 연주하는 기계를 설계하였고, 그리스에서는 안티사이테라로 알려진 컴퓨터를 이용해 두 개의 회전하는 바퀴 축을 이용해 행성, 태양, 달의 위치를 예측하는데 도움을 받았다. 4세기 경 이슬람권에서는 별의 위치, 시각, 경위도를 관측하는 천문기계인 아스트롤라베가 있었고, 13세기경에는 페르시아 알 자자리가 물을 끌어올리거나 음식을 제공할 수 있는 기계를 설계하였다. 이후 1세기가 지나고 스트라스부르 성당의 첨탐에 매일 정오에 날개를 퍼덕거리며 부리를 벌리고 혀를 내빌어 소리를 내는 수평아리 기계가 설치 되었다.
산업혁명기라고 불리는 18~19세기에는 프랑스 기술자 보캉송이 “플룻 연주자”, 걷고 먹고 배설할 수 있는 “자동으로 움직이는 오리”등을 개발하였는데, 이것이 훗날 외부 기계 장치에 의해 움직이는 자동화 기구의 표준이 되었다. 이를 기점으로 자동화 장치는 매우 빠른 속도로 발전하였다. 1900년 루이스 폐류가 마차를 이끄는 자동 인형인 “자동 인간”을 발표하였다. 아동문학가 프랭크 봄은 “양철인간”, “틱톡”과 같은 오늘날의 로봇과 유사한 캐릭터를 만들며 상상력이 더해져 다양한 로봇이 등장하기 시작하였다.
1946년 조지 데볼이 마그네틱 테이프에 명령을 기록하여 기계를 제어하는 방법을 제시하였고, 1948년 그레이 월터가 미리 입력된 명령에 의해 빛이 반응하고 빛을 따라다니는 “거북 로봇”을 통해 최초의 자율 지능형 로봇을 발표하였다. 1954년 조지 데볼은 산업용 로봇을 통해 반복적인 작업을 수행하는 산업용 로봇을 고안하였다. 1963년 일본작가 데스카 오사무라에 의해 “철완아톰”이 탄생하였고, 1968년 Stanford연구소에 최초로 컴퓨터에 의해 제어되는 자율 이동식 로봇인 샤키(Sharky)가 개발되었다. 1970년 소련에서 자동 달관측 로봇인 “루노호트 1호”가 제작되었으며, 1973년 일본 이족보행로봇 “와보트1″을 제작하였다. 1986년 일본 HONDA社에서 휴머노이드 로봇을 개발하기 시작하였다. 1997년 최초의 휴머노이드로봇 “P2″가 개발 되었다. 2001년 휴머노이드 로봇의 결정체 “아시모가” 발표되었고, 국내 KAIST 오준호 교수팀에서 한국형 휴머노이드 로봇개발을 착수하였다. 2003년 KHR-2, 2003년 국산 휴머노이드 로봇의 자존심 HUBO가 탄생하였다.
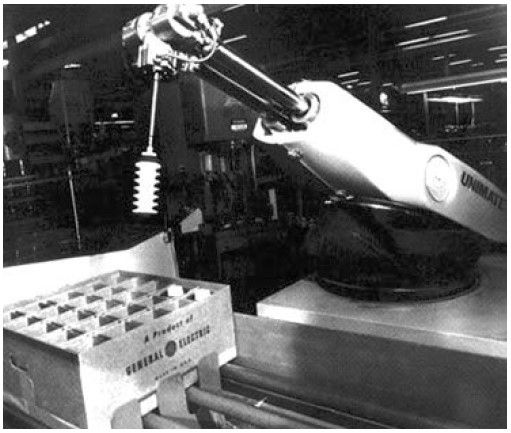
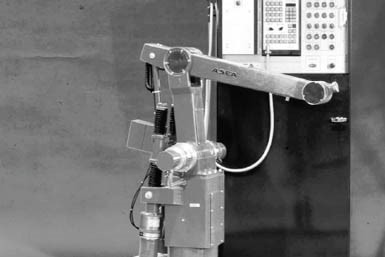
최초의 산업용 로봇은 미국 Unimation사와 AMF사가 미국의 George C. Devol이 1954년 출원한 특허 Playback로봇의 개념을 이용하여 1962년 각각 Palyback로봇(Unimate 및 바사토런)실용 1호기를 제작하였다. 유럽에서는 1963년 스웨덴의 Kaufeld사가 프로그램 가능한 매니퓰레이터 1호기를 제작하였다. 1966년 노르웨이 Tralfa社(현, ABB사, 1985년 합병)가 세계 초초로 도장전용 로봇을 제작하였다. 1973년 ASEA사(현 ABB사)는 세계 최초로 서보모터 구동 수직 다관절 로봇의 시작품 제 1호기를 제작하였다.
일본은 1969년 Kawasaki중공업이 Unimation사와 기술제휴를 통해 로봇 생산을 개시하여 세계 최대의 로봇 산업국이 되었으며, 그 보급률 또한 세계적인 수준이 되었다.

1.4 국내 산업용 로봇의 역사
국내 산업용 로봇은 1980년 초 일본 기업들과 기술제휴를 통해 도입한 것이 그 시발점이 되었다. 현대중공업은 1984년 로봇사업팀을 만들어 일본 나치(Nachi사)와 기술제휴를 통해 로봇 생산판매를 시작하였다. 1995년 독자모델이 개발되며 1999년 NACHI사와 기술제휴를 종료하고 독자모델 생산판매로 사업을 전환하고 있다. 1989년 일본 야스카와전기는 두산기계, 삼성항공과 일본화낙은 대우중공업 및 한국 화낙, 가와사키중공업은 기아기공과 각각 기술제휴 관계를 맺고 국내시작에 진출하였다.
두산메카텍은 FA사업부에서 1992년 국내 최초 용접용 로봇 개발 착수에 성공하여 1998년 로봇 DR6와 제어기 DRC 1호기를 출하하였으며, 2009년 500호기 돌파, 2010년 오토그룹에서 두산메카텍 로봇사업부를 인수하였다. 오토그룹 로봇사업무는 병렬형태의 DR6를 직렬형태의 OTR6로 개발완료하였다. 2015년 OTR6 1호기, 2016년 가반하중 20kg의 OTR20 1호기를 출하하였다. 이후 2017년 6월 오토로보틱스로 분사하여 산업용 로봇을 제조하고 있다.


1.5 산업용 로봇의 특징
로봇 산업은 기계와 전자, 컴퓨터 공학이 서로 유기적인 연관을 맺는 시스템이다. 즉, 기계, 통신, 제어, 반도체, 전기, 전자, 음성/영상, 센서, 매커니즘, 엑츄에이터, 인공지능, SI등 다양한 분야의 학문을 로봇이라는 분야에 집약시키는 노력이 필요하다.
또한, 산업용 로봇은 고부가가치 제품으로 자원이 부족한 국가에서도 육성이 가능한 지식집약적, 고부가가치 산업으로 엄청난 파급효과를 가진다. 산업용 로봇은 반도체, 자동차 산업등에서 대량 자동 생산을 위한 필수 요소로 사용되어, 원가 절감이나 생산성 향상을 위해 산업용 로봇 기술 개발이 필수적이다.
산업용 로봇은 미래 산업으로 공급자 측에서 하드웨어 중심의 연구와 이용자 측에서 소프트웨어 중심의 연구가 공동으로 요구되는 기술 개발형 산업이다. 이는 로봇산업은 부속/소재 산업 등의 기반 환경이 필요하고 제품화를 위한 가전산업/IT산업 등의 응용/생산 기술이 필요하다.
마지막으로 산업용 로봇의 개발은 자사활용 후 실용화 하기 때문에 전반적으로 전문 메이커보다는 겸업 메이커가 많은 산업이다.
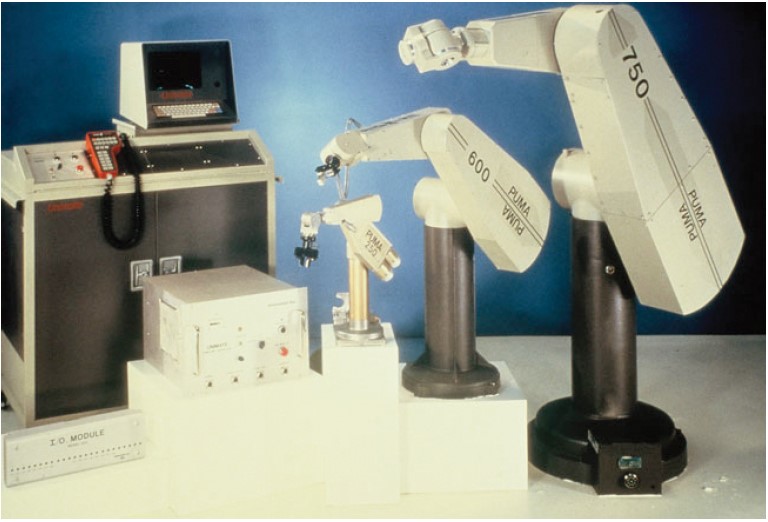
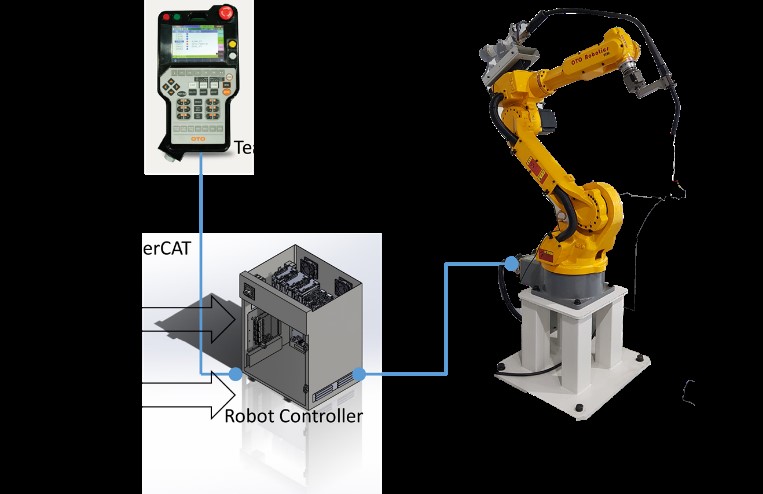
수직다관절로봇은 로봇 매니퓰레이터(Manipulator), 제어기(Controller), 조작기(Teaching Pendant)로 구성되어 있으며, 매니퓰레이터의 각 부의 링크와 AC서보모터, 감속기로 구성되어 있다. 제어기는 서보드라이버와 함께 모션제어기능을 하는 모션보드, 데이터를 통합하는 메인보드, IO관리를 하는 IO보드와 이를 서로 Multi-Process할 수 있게 하는 마더보드로 구성되어 있다. 마지막으로 사용자 조작기는 사용자가 사용하기 편리하게 해주는 UI를 구성하고 있다.
- 한국과학기술정보연구원, “산업용 로봇”, 2002. 12
답글 남기기