2025. 4. 28. 22:15ㆍTheory/Robotics
위키피디아에서 로봇은 "다양한 작업을 자동으로 수행하도록 프로그래밍된 기계장치"로 정의하고 있다.
프로그램으로 작동하고(Programmable), 사람이 직접 수행할 수 없는 어렵고 복잡하며, 위험한 일련의 작업들(complex series of actions)을 사람 대신 실행하는 기계 장치라고 하고 있다.
또한, 국내 안전인증/자율안전확인신고 절차에 관한 고시 별표 2에 따르면 산업용 로봇은 직교좌표로봇을 포함하여 3축 이상의 머니퓰레이터(엑츄에이터, 교시 펜던트를 포함한 제어기 및 통신 인터페이스를 포함한다)"로 정의하고 있다.
그렇다면 로봇의 어원은 어디서 부터 왔을까? 로봇은 1920년 체코슬로바키아의 극작가 카렐 차페크(Karel Čapek)의 희곡 Rosuum's Universal Robots에서 처음 사용 되었다.
 |
 |
| 그림 1. Karel Čapek | 그림 2. Rosuum's Universal Robots |
로봇의 어원은 체코어의 노동을 의미하는 단어 'robota'라고 알려져 있다. 차페크는 R.U.R에서 모든 작업능력이 인간과 동등하거나 그 이상이면서 인간적 "감정"이나 "혼"을 가지고 있지 않은 로봇이라고 불리는 인조인간을 등장시켰다.
이후 1942년 아이작 아시모프(Issac Asimov)가 발간한 단편 런어라운드(Runaround)에서 로보틱스(Robotics)라는 말을 처음 등장시켰다. 아이작 아시모프는 1950년 "I, ROBOT"에서 로봇의 행동 3원칙에 대하여 제안하였다.
제1법칙 : 로봇은 인간에게 해를 끼쳐서는 안 되며, 위험에 처해 있는 인간을 방관해서도 안 된다.
제2법칙 : 로봇은 인간이 내리는 명령들에 복종해야만 하며, 단 이러한 명령들이 첫 번째 법칙에 위배될 때에는 예외로 한다.
제3법칙 : 로봇은 자기 자신을 보호해야만 한다. 단, 제1법칙과 제1법칙을 걸러버릴경우는 예외다.
이후 1985년 "로봇과 제국"에서 위 3법칙을 보완하기 위해 제0법칙을 추가 하였다.
제0법칙 : 로봇은 인류에 해를 끼치면 안되며 인류에 해를 끼치는 것을 방관하지 않는다.
 |
 |
 |
| 그림 3. Issac Asimov | 그림 4. 런어라운드 | 그림 5. I, ROBOT |
산업용 로봇은 1962년 미국에서 개발되었다. 미국인 엔지니어 George Charles Devol, Jr.가 제안한 "티칭과 플레이백에 의해 자동화로 유연하게 대응하는 로봇"이라는 아이디어와 "로봇의 아버지"라고 불리는 Joseph Frederick Engelberger가 만나서 개발하게 된 것이 유니메이터(Unimate)로봇이다.
 |
 |
| 그림 6. Devol과 Engelberger | 그림 7. 최초의 로봇 Unimate |
유니메이트를 제조/판매하는 유니메이션사와 기술 도입 계약을 맺은 것은 일본의 가와사키 중공업니다. 일본은 기술력을 총동원하여 일본 국산화를 도모하였고, 1969년 일본 최초의 산업용 로봇 "가와사키 유니메이트 2000형"을 발표하였다.

그림 8. 일본 가와사키 중공업 "가와사키 유니메이트 2000형"
산업용 로봇은 자동차 산업을 중심으로 가속화 되었다. 1969년 GM은 로즈타운 공장(Lordstown Assembly Plant)에 첫 스폿용접(Spot Welding) 로봇을 설치하였다. 기존에 20~40%에 불과하던 차체 용접 공정 자동화율을 90%이상까지 올려 놓을 수 있었다.
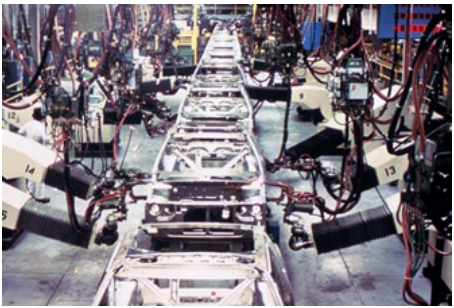
1971년 유명한 자동차 회사인 다임러 벤츠의 진델핑엔(Sindelfingen)공장에 유압으로 동작하는 로봇을 사용하는 첫 생산 라인이 설치 되었다. 벤츠는 유럽 최초로 KUKA 로봇으로 용접 트랜스퍼 라인을 구축하였다.

KUKA사는 기술을 진보시켜 1973년 6개의 전기기계 구동 축을 가진 로봇을 개발하여 에너지 효율을 끌어 올렸다.

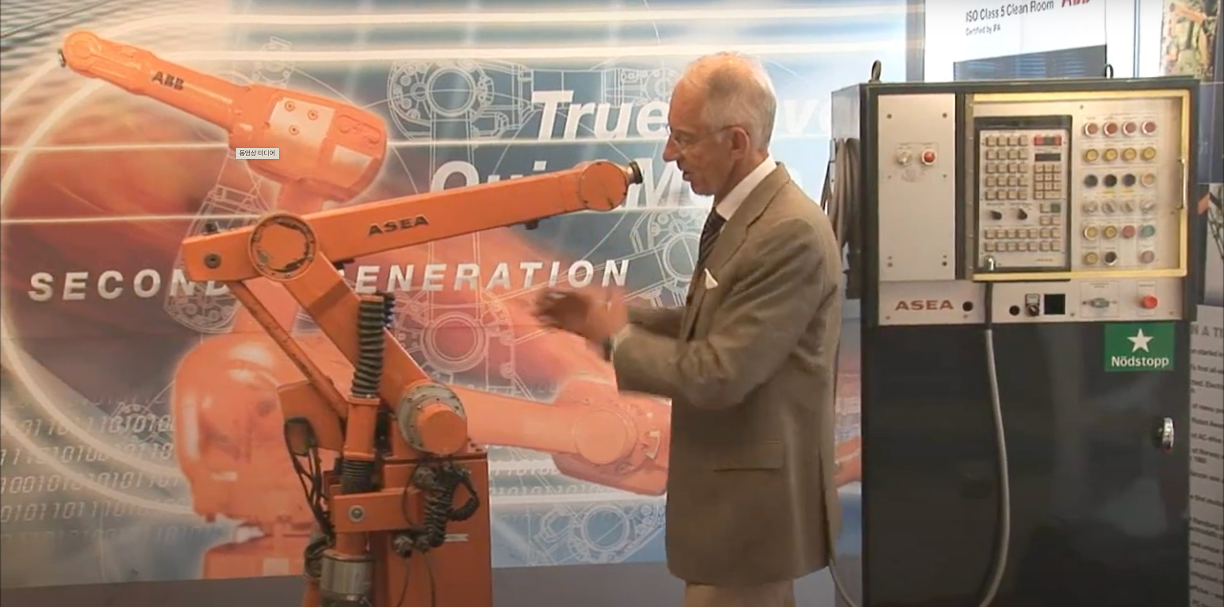
1974년 ASEA사는 최초의 완전 전기 마이크로프로세서 제어 산업용 로봇을 개발하였다. IRB6의 S1제어기는 인텔 8비트 마이크로프로세서를 최초로 사용하였다. 당시 메모리는 16KB였으며, 디지털입출력은 16점을 가지고 있었다. 또한 16개의 키와 4자리 LED 디스플레이를 가지고 제어 및 프로그래밍을 수행하였다.
ASEA사 : 1988년 스웨덴 ASEA사와 스위스 Brown Boveri가 합병해 스위스 ABB사가 됨.)
로봇은 거듭 발전하여 1979년 일본 나찌(Nachi)사가 처음으로 모터로 구동하는 로봇을 개발하였다. 나찌의 스팟 용접로봇은 기존의 유압 구동 로봇을 대체하여 새로운 시대를 여는 시작이 되었다.

이후 로봇은 사용자 편의 중심으로 다양한 기능들과 가반하중으로 라인업을 넓혀 가기 시작하였다. 특히 일본의 화낙은 가반하중 1,500kg의 산업용 로봇을 출시할 정도로 넓은 가반하중 로드맵을 가지고 있다.
2000년대 중반 산업용 로봇의 기술이 정체기에 빠져 있을 때, 등장한 것이 협동로봇이다. 협동로봇은 2008년 Universal Robot에서 최초의 상업용 로봇인 UR5를 출시하면서 대중화 되기 시작하였다. 협동로봇은 2006년 독일 로보틱스 & 메카트로닉스 연구소 DLR과 KUKA사가 협력하여 만든 로봇이 최초이다. 당시 외부는 알루미늄으로 만들고, 가반하중은 7kg으로 설계되어 로봇의 중량이 16kg의 경량 로봇은 에너지 효율성과 휴대성이 뛰어다나는 장점이 있었다. 특히 센서를 내장하여 민감도가 높아 최초의 협동 작업을 가능하게 하였으나, 너무나도 터무니없이 높은 가격에 시장성을 잡지 못했다. 반면 UR은 가격을 낮춰 시장을 선도하기 시작하였다.
 |
 |
| 그림 14. KUKA iiwa 로봇 | 그림 15. Universal Robot UR5 |
한국의 산업용로봇은 1978년 현대 자동차가 일본 토요타에서 제작된 스폿용접 로봇을 울산 제2공장에 도입하면서 부터 시작되었다.
1980년 KAIST의 변증남 교수님은 국내 최초의 산업용 로봇 팔인 '카이잼'을 개발하여 발표하였다. 카이잼은 부품 핸들링용 수평 다관절 로봇이였다. 변증남 교수님은 한국 로봇의 대부로 2017년 지병으로 작고하시어 많은 로봇 공학자들에게 아쉬움을 남기셨다.

1984년 대우중공업은 아크용접용 수직 다관절 로봇 'NOVA-10'과 제어장치를 국산화 하였으나, 장치의 신뢰성 문제로 상용화 라인에 투입하는데는 실패하였다. 이후, 1987년 금성산전(LG산전 -> LS일렉트릭)에서는 수평 다관절 로봇을 개발하여 평택공장 비디오 카세트 녹화기 라인에 투입하는데 성공하였다. 이후 1991년 삼성전자가 SCARA로봇 개발에 성공하여 당해 66대를 VCR조립라인에 투입하였고 20%이상의 원가절감효과를 거두었다.
이후 현대 중공업이 수직 다관절 로봇을 개발하여 국산 로봇의 공급이 활발히 전개 되었지만, 1997년 우리가 잘 아는 IMF 외환위기로 신규 설비 투자가 급격히 감소하면서 공장자동화에 대한 수요 부족으로 산업용 로봇 시장에 찬바람이 불었다.
현재 국내에는 산업용 로봇을 개발하는 HD 현대로보틱스와 로보스타가 있으며, 시장을 선도하고 있다.
(이외에도 유일로봇, 민트로봇, 나우로보틱스 등 많은 로봇 제조 업체가 있지만 양산화를 하진 못하고 있다.)
또한, 협동로봇 시장에서 두산로보틱스, 레인보우로보틱스, 뉴로메카, 한화로보틱스 등 많은 업체가 시장을 이끌고 있으며, 끊임 없는 기술 개발로 밝은 로봇 시장의 전망을 이끌고 있다.
'Theory > Robotics' 카테고리의 다른 글
| 평면에서의 회전변환 (0) | 2025.05.06 |
|---|---|
| 블로그 첫 글 [2025.04.25 10:07 ~ ] (0) | 2025.04.25 |